Tutorial: wir bauen einen FPV-Racer (ZMR250, Flip32, Videobrille, u.v.m.)!
Heute bauen wir uns einen FPV Racer! Vielleicht geht es ja dem ein oder anderen genauso, dass durch den Cheerson CX-20 oder den Hubsan X4 der Einstieg in die Quadrocopter-Welt gelungen ist. Wenn man einmal Blut geleckt hat, dann will man mehr! Glaubt mir :-). Zur Zeit sind die 250er Quadrocopter, also mit einem diagonalen Motorabstand von 250mm besitzen, schwer im Kommen.
Diese Copter sind nicht nur klein und wendig, sondern lassen sich auch über FPV, also dem Videoflug (FPV = First Person View) steuern und damit werden sogar Rennen an verschiedenen Orten wie leeren Parkhäusern ausgetragen. So entstehen ziemlich coole Star Wars mäßige Videos – doch dazu später mehr. Dieser Artikel soll euch einen kleinen Einblick in die Welt der Selbstbaucopter geben, falls ihr auch einen Schritt weiter gehen wollt.

Inhalt
Das Frame bzw. der Rahmen unseres FPV-Racers
Fangen wir mit dem Frame an, der das Grundgerüst bietet. Hierbei haben sich Rahmen aus Carbon oder Glasfaser etabliert, da es sich um ein leichtes aber widerstandsfähiges Material handelt. Es gibt ein Frame aus China, das sehr weit verbreitet ist und sich durch den günstigen Preis und der guten Verarbeitung einen Namen gemacht hat. Der ZMR250 ist ein Carbonframe, das euch genügend Platz für eure Bauteile lässt und dazu auch noch sehr gut aussieht.
- H250 ZMR250 Frame für 33,60 USD
- Preis 33,60 USD
- 250mm Frame aus Carbon (CFK)
- Gewicht: 145 Gramm, 3mm Arme
- Anti-Vibrations Platte für Mobius Kamera
Mit diesem Frame solltet ihr Aufgrund des starken Materials auch die ersten Crashs sicher überstehen. Wer lieber etwas weniger ausgeben möchte, kann auch zu der Version aus GFK (Glasfaser) für 16,29 USD greifen, muss dafür aber mit einem höheren Gewicht von 181 Gramm und einer niedrigeren Crashresistenz leben. Eine dritte Alternative bietet euch der Diatone #37 für 26,80 USD. Dieser ist zwar auch aus GFK gefertigt, ist dafür aber mit einem Gewicht von 120 Gramm der leichteste Rahmen im Rennen. Zusätzlich dazu bietet er euch noch eine Stromverteilerplatine mit LED Beleuchtung, welcher den Aufbau des Copters erleichtert.
Generell lässt sich sagen, das auf Grund der kleineren Rotorblätter und Gewichte der 250er, z.B. im Vergleich zu den 450ern wie der CX-20, wesentlich geringere Kräfte auftreten und es im Fall der Fälle mit Ersatzrotorblättern meist getan sein sollte. Falls der große CX-20 mal abstürzt sind meist auch gleich neue Kufen und mit Pech ein neues Gehäuse für ~40€ fällig. Deswegen tragen die FPV-Racer auch häufig Beinamen wie „Bolzcopter“ oder „Heizcopter“ – man traut sich eben mehr :-).
Das „Herz“: der Flugcontroller
Ein weiteres wichtiges Bauteil ist die Flugsteuerung, häufig auch als FC (Flightcontroller) bezeichnet. Der FC, welcher das Gehirn des Copters darstellt, nimmt die Befehle von eurem Empfänger entgegen und sorgt dafür, dass der Copter auch stabil in der Luft liegt. Bei den kleinen 250er Coptern haben sich vor allem zwei verschiedene Steuerungen etabliert, die sich jedoch von den Sensoren und der Bauform nur knapp unterscheiden.
Zum einen gibt es die CC3D Steuerung für 15,99 USD, welche mit der OpenPilot Software läuft. Sie bietet euch mit einem 3 Achs Gyro und einem 3 Achs Beschleunigungssensor die Möglichkeit den Copter im Kunstflug oder im stabilisierten Flug durch die Gegend zu jagen. Sie ist zudem später noch mit weiteren Sensoren wie z.B. GPS erweitebbar.
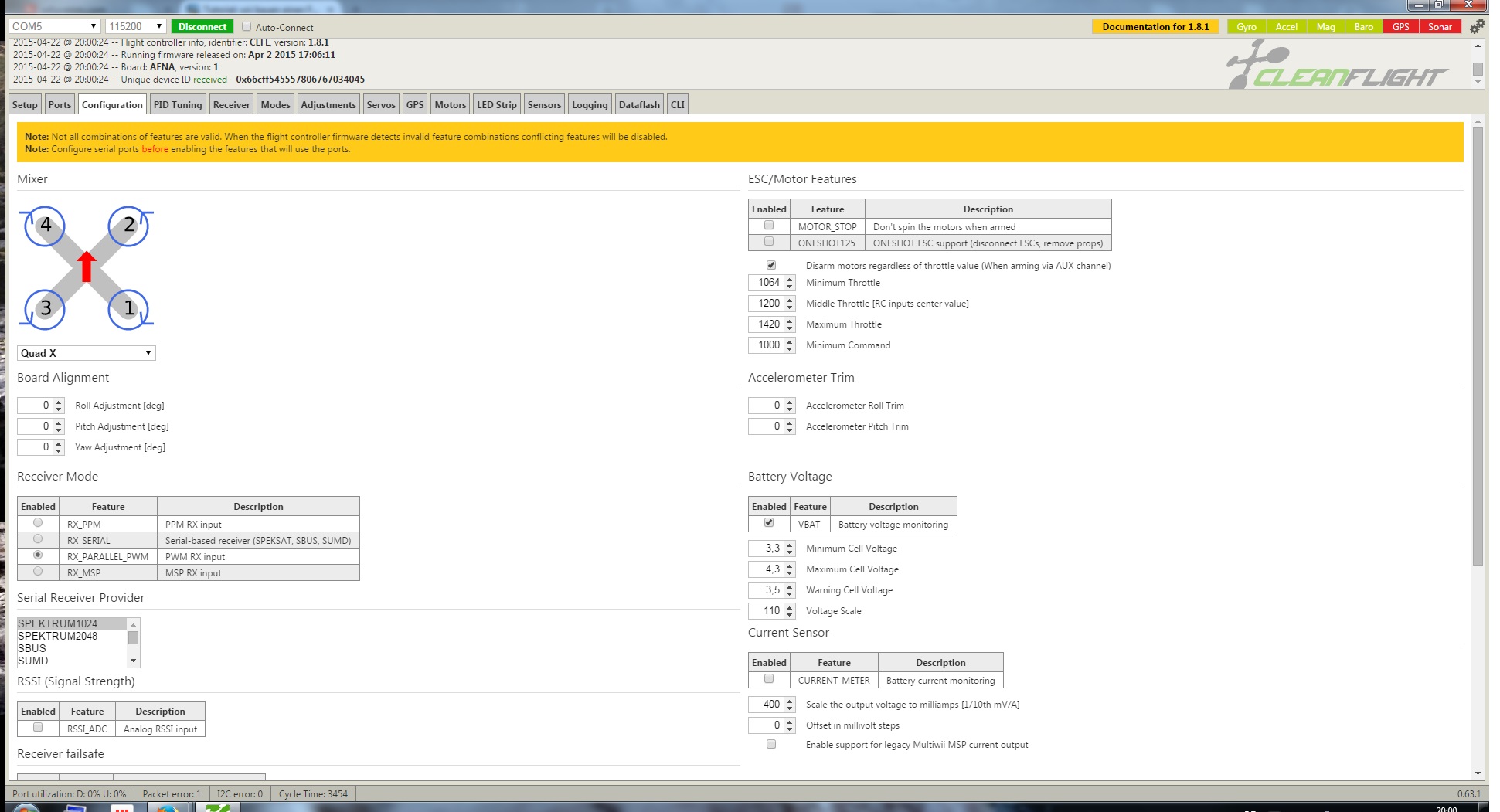
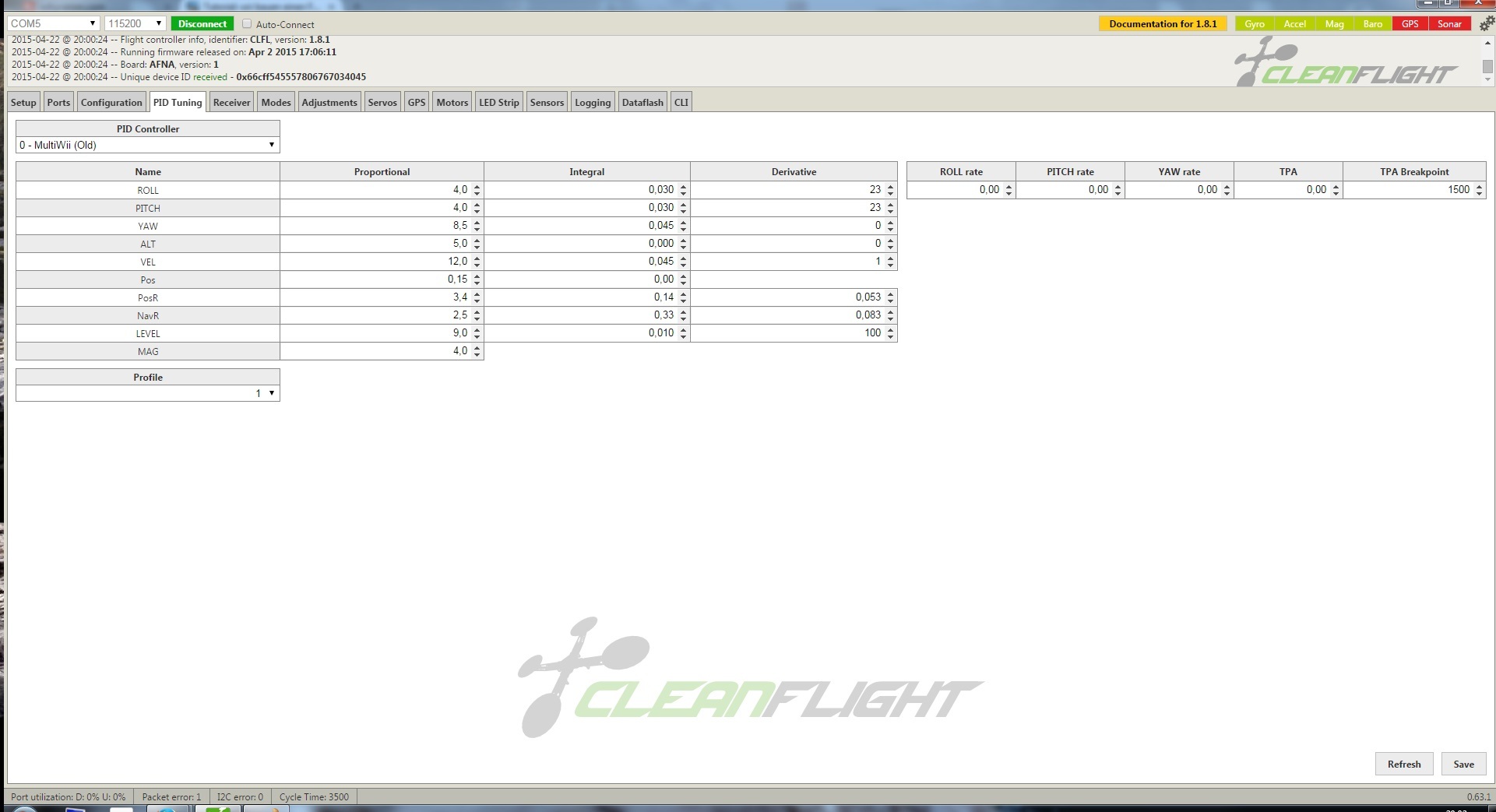
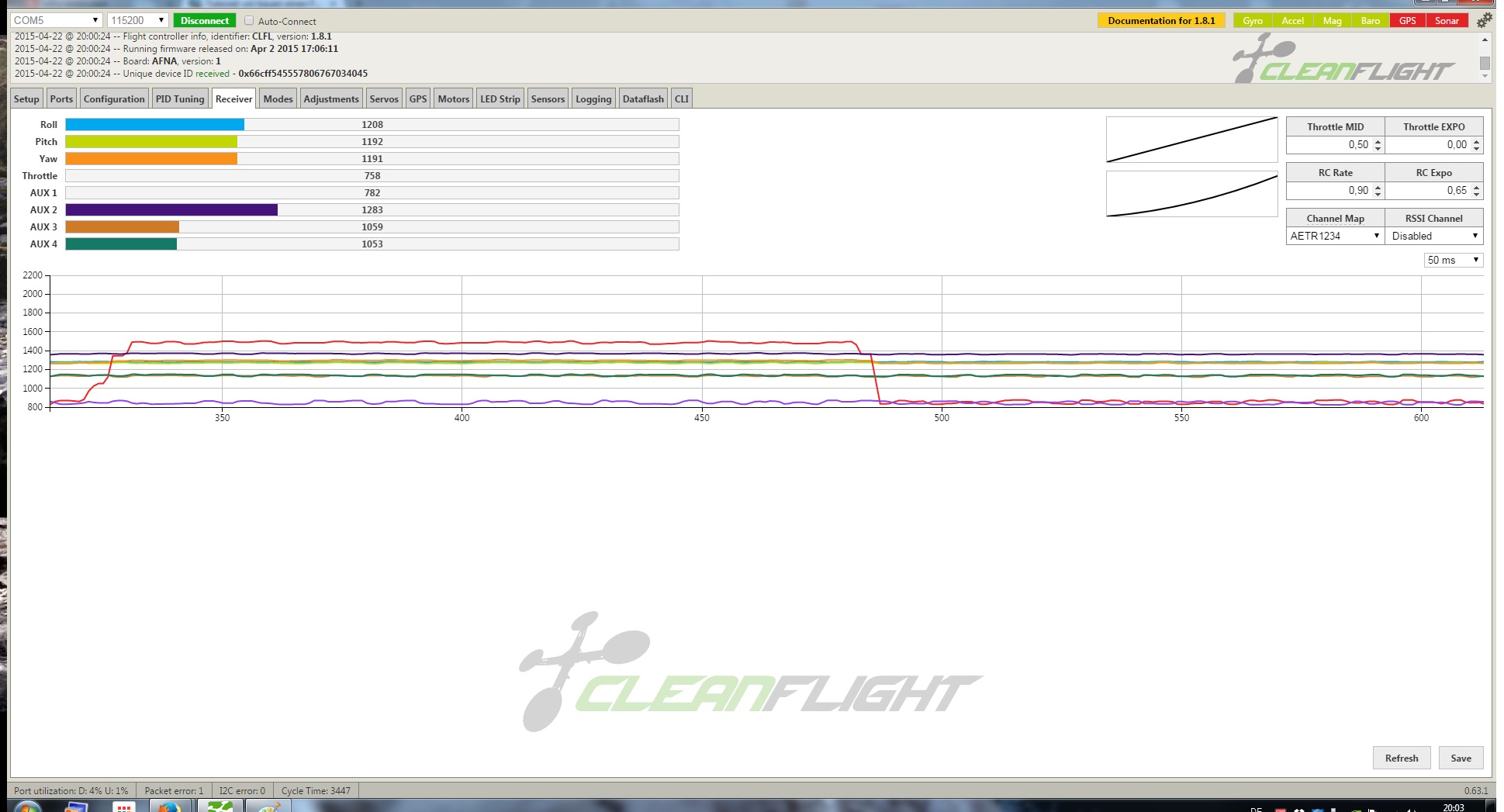
Die zweite Alternative ist das Flip32 Board für 24,59USD, dass einen Nachbau des Naze32 Full darstellt und neben Gyro und Acc auch noch über einen Barometer und Magnetometer verfügt. Zusätzlich zum Kunstflug, welcher auch als ACC oder GYRO Mode bezeichnet wird, könnt ihr hiermit auch selbststabilisierend (Auto-level) fliegen oder mithilfe des Barometers automatisch die Höhe halten. Als Software lässt sich hierfür entweder Baseflight verwenden oder die modifizierte Version Cleanflight, welche einen höheren Funktionsumfang gewährleistet und unter anderem auch ein externes GPS unterstüzt.
Auftrieb: der richtige Motor, Regler und Propeller
Ebenso wichtig wie der FC ist auch der Antrieb eines Copters. Der Antrieb besteht aus mehreren Komponenten, den Motoren, den Reglern (ESCs) und den dazu passenden Propellern. Ich habe euch 3 verschiedene Antriebssets herausgesucht, aus welchen ihr das passende Auswählen könnt.
Antriebset: Günstig
Dieses Set ist wohl die günstigste Variante den kleinen Flitzer in die Luft zu bekommen. Für den Einsteiger ist es eine gute Kombination, jedoch hat sie auch am wenigsten Power, was zum Beispiel mit Zusatzgewicht in Form einer Kamera schwierig werden kann. Auch Kunstflug ist mit dieser Kombination möglich, wer jedoch gewagtere Manöver fliegen möchte, sollte ein stärkeres Setup verbauen. Es gibt das Ganze als komplettes Set für 16,08 USD und ihr benötigt das Set vier mal – und zwar 2 mal CW (im Uhrzeigersinn) und 2 mal CCW (gegen den Uhrzeigersinn).
- 1804 Motor mit 2300kv (Umdrehungen/Volt)
- 10A ESC mit integriertem 5V BEC
- Gemfan 5030 Propeller
- Ausgelegt für 3 Zellen LiPo Akkus
Antriebset: „Bang for the Buck“
Das zweite Set besteht aus Teilen, die unter dem Aspekt ausgesucht wurden, ein sehr gutes Preis-Leistungs Verhältnis zu haben. Hier bekommt ihr jede Menge Power für normalen Flug bis Kunstflug und könnt zudem auch noch locker eine Kamera mitnehmen. Das Set ist ein wenig teurer als das günstige Set, jedoch hat es auch noch Kraftreserven, wenn ihr über die ersten Versuche hinaus seid und mal etwas experimentieren wollt. Ihr benötigt hierfür jeweils 4 Motoren und 4 Regler und dazu passend die Propeller. Bei den Propellern würde ich gleich ein paar mehr Sets kaufen, da diese erfahrungsgemäß zu den Verschleißteilen gehören.
- DYS 1806 Motor 2300kv für 9,85 USD
- 12A ESC mit 5V BEC und SimonK Firmware (besseres Reglungsverhalten) für 8,60 USD (unter Optionen 12A auswählen)
- Propeller 4x 5030 für 2,22 USD oder 4x 6030 für 3,89 USD
- Ausgelegt für 3 oder 4 Zellen LiPo
Antriebsset: Leistung
Die letzte Auslegung des Antriebs zielt vor allem auf die Power ab. Hierbei habt ihr genügend Leistung für alle möglichen Tricks und könnt den Copter in den höchsten Geschwindigkeiten über die Wiese jagen. Vom Preis her ist dieses Set jedoch auch das teuerste und eignet sich somit eher für diejenigen, welche schon ein wenig Erfahrung mit dem Fliegen von Drohnen haben. Genau wie bei den anderen Sets benötigt ihr hierbei wieder 4 Motoren und 4 Regler mit dazugehörigen Propellern.
- EMAX Mt2206 Motoren 1900kv für 16,99 USD
- 20A ESC mit 5V BEC und SimonK Firmware (besseres Reglungsverhalten) für 9,60 USD (unter Optionen 20A auswählen)
- Propeller 4x 6045 für 3,99 USD
- Ausgelegt für 4 Zellen LiPo
Die richtigen LiPo Akkus
Ohne Strom fliegt auch der beste Copter nicht, weshalb ich an dieser Stelle mal etwas über die Akkus erzählen möchte. Zum Einsatz kommen hier LiPo Akkus, wie ihr sie auch aus den fertigen Coptern kennt. Es werden je nach Motorisierung etweder Akkus mit 3 Zellen, welche 11,1V liefern oder mit 4 Zellen und 14,8V verwendet. Die Kapazität liegt bei den 250er Coptern zwischen 1300mAh und 1800mAh für ein wenig mehr Flugzeit. Die kleineren Akkus sind leichter und bieten euch so ein agileres Flugverhalten.
Ein weiterer wichtiger Punkt bei den Akkus ist das C-Rating. Dieses gibt an, wieviel Strom so ein Akku abgeben kann. Ein 10C Akku mit 1000mAh = 1Ah kann 10C x 1Ah = 10A an Strom freisetzen. Da die kleinen Copter häufig sehr stark motorisiert geflogen werden und nur kleine Akkus dabei haben, sollten Akkus mit einem hohen C-Rating gewählt werden, um genügend Strom liefern zu können. Hier sind einige passende Akkus:
- Zippy Compact 3 Zellen 1300mAh 40c für 9,45 USD
- Zippy Compact 3 Zellen 1800mAh 40c für 16,79 USD
- Zippy Compact 4 Zellen 1300mAh 40c für 12,70 USD
- Zippy Compact 4 Zellen 1800mAh 40c für 17,40 USD
Um die Akkus aufzuladen benötigt ihr dann noch ein passendes Ladegerät. Hierbei würde ich euch das iMax B6AC für 34,99 USD empfehlen, da ihr hier kein separates Netzteil benötigt und von 1s bis 6s verschiedene LiPos laden könnt. Das Gerät ist dank des eingebauten Displays leicht zu bedienen und bietet euch neben LiPo Akkus auch noch andere Varianten zum Laden an.
Alles im Griff: die Fernsteuerung
Mit der bisherigen Liste ist der Copter schon in der Lage zu fliegen, jedoch soll er ja auch von uns gesteuert werden, weshalb (wenn noch nicht vorhanden!) noch eine Fernsteuerung benötigt wird. Hierfür benötigen wir mindestens 5 Kanäle, jeweils für die Rotation um eine der 3 Achsen, der Motorsteuerung und einen Schalter für die Flugphasen. Da dieses Thema schon alleine dafür reichen würde, mehrere Artikel zu füllen will ich euch nur kurz 2 Optionen vorstellen.
Die erste Option RadioLink T6EHP für 43,99 USD. Hier bekommt ihr für günstiges Geld eine 6 Kanal Fernsteuerung mit passendem Empfänger, die euch jedoch nicht viele Optionen darüber hinaus bietet. Sie reicht aus um den Copter zu steuern und leider auch nicht viel mehr.
Wer tiefer in das Hobby einsteigen möchte, sollte sich vielleicht mit Option 2 befassen, der FrSky Taranis Plus. Hier bekommt ihr eine vollwertige Senderanlage mit Telemetrie und jeder Menge Optionen dank einer offenen Software. Auch für spätere Erweiterungen im Hobby seid ihr hiermit auf der sicheren Seite, jedoch sollte das Ganze weges des hohen Kaufpreises von 250 USD gut überlegt sein.
Zwischenfazit – es geht noch weiter
Wer bis hierhin gelesen hat, sollte nun alle Links gefunden haben, die er benötigt um einen kleinen 250er Quadrocopter zusammenzustellen. Für den Zusammenbau benötigt ihr dann noch Werkzeug, was aber in Form von Schraubendrehern in fast jedem Haushalt zu finden sein sollte. Lediglich für die Verkabelung ist ein Lötkolben erforderlich. Wer keine Lust hat eine Kabelspinne zu löten kann auch auf eine Stromverteilerplatine für 2,99 USD benutzen. Um den Copter mit dem Akku zu verbinden benötigt ihr noch die passenden Stecker, bei denen das XT60 Format weit verbreitet ist. Falls euch die vielen Links überfordern gibt es hier auch ein recht gutes Komplettset für 145,99 USD, bei dem nur noch die Fernsteuerung inklusive Empfänger fehlt.
Wer Modellflug betreiben möchte, braucht auch eine Versicherung, da dieses in Deutschland eine Pflicht ist. Anbieter sind dafür zum Beispiel der DMFV oder der DMO. Ihr solltet euch jedoch vorher informieren, was die Police alles abdeckt, da es zum Beispiel welche gibt, die nur das Fliegen auf dem Vereinsgelände versichern.
So weit, so gut. Nun dürftet ihr die ersten Runden düsen … aber Moment … da geht doch noch mehr? Genau! Jetzt wird’s erst richtig interessant!
FPV – First Person View
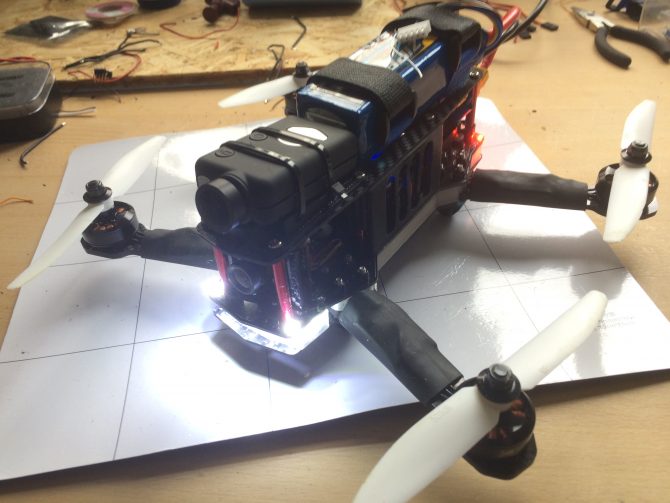
Ich bin auch immer wieder sehr erstaunt, was man mit diesen kleinen Quadrocoptern alles anstellen kann. Einen kleinen Einblick bekommt ihr im versprochenen Video, welches ein paar schöne Ausschnitte von einer Onboardkamera zeigt, welche auf dem 250er Quad installiert wurde. Hierfür wird meistens die Mobius Kamera (wir berichteten) auf den Copter geschnallt, da die meisten Rahmen hierfür schon eine Platte vorgesehen haben, auf welcher die Kamera befestigt wird und welche auch noch gegen Vibrationen gedämpft ist.
Fett, oder? Falls euch das immer noch nicht als Überzeugungshilfe reicht, könnt ihr euch auch mal dieses „Star Wars Video“ anschauen. Erinnert stark an die Podracer, oder? Diese Videos wurde mit FPV geflogen und soll nun ein wenig thematisiert werden. FPV steht für First Person View und beschreibt den Flug aus der Pilotensicht. Hierbei wird der Copter nicht wie üblich auf Sicht (auch als LOS – Line of Sight bezeichnet) geflogen, sondern über eine kleine Kamera, welche das Bild direkt vom Copter an den Piloten streamed. So bekommt der Pilot das Gefühl, dass er in dem Copter sitzt und kann diesen so viel direkter steuern. Der FPV Flug ist dabei nicht nur ein besonderes Erlebnis sondern auch recht praktisch, weil man Entfernungen besser Einschätzen kann und auch nicht mehr umdenken muss, wenn man zum Beispiel auf sich zu fliegt. Glaubt mir, ein PC-Flugsimulator ist dagegen ein Kindergeburtstag ;-).
Die Komponenten, welche ich weiter oben vorgestellt habe, sind ausreichend, um einen flugfertigen Quadrocopter zu bauen. Wer sich nun den 250er auch noch mit einem FPV-Set ausrüsten möchte, benötigt noch 4 weitere Bauteile: Eine Kamera, einen Videosender, einen passenden Videoempfänger und ein Anzeigegerät. Im Folenden werde ich euch eine Kombination vorstellen, mit welcher ihr die erste FPV Luft schnuppern könnt.
Für ein gutes Bild: die Kamera
Als günstige Kamera für den Einstieg kann ich die Sony 600TVL CCD Kamera für 23,88€ empfehlen. Dank des CCD Sensors und mit der WDR Funktion, welche über ein OSD aktiviert werden kann, bietet die Kamera euch ein sehr kontrastreiches Bild, was die Orientierung erleichtert und für ein schönes Flugerlebnis sorgt. Das praktische ist die Stromaufnahme von 12Volt, weshalb sie auch ohne weitere Umstände direkt an einem 3 Zellen LiPo betrieben werden kann, wie zum Beispiel dem Flugakku.
Videosender und -empfänger
Da der Videosender und Videoempfänger miteinander harmonieren müssen, werde ich dieses Thema zusammen behandeln. Es gibt verschiedene Frequenzen, jedoch hat sich das 5,8gHz Band etabliert, da dieses nicht mit der 2,4gHz der Fernsteuerung überlagert wird und in Deutschland mit einer Sendeleistung von maximal 25mw legal betrieben werden darf. Ich werde mich bei der Vorstellung auf die Produkte von ImmersionRC beschränken, da diese nicht, wie die meisten Systeme aus China, im E-Band funken, welches in Deutschland nicht ohne Weiteres betrieben werden darf.
- ImmersionRC 5,8gHz Videosender 25mw für 56,50€
- [elink id=331386304523]ImmersionRC 5,8gHz Videoempfänger Uno für [eprice id=331386304523][/elink]
- [elink id=161361808094]ImmersionRC Antennenset für [eprice id=161361808094][/elink]
Zusammen mit dem Antennenset bekommt ihr so ein gutes Paket, welches legal in Deutschland betrieben werden kann. Aus persönlichen Erfahrungen kann ich euch sagen, dass die 25mw ausreichend sind und ich damit schon über 700 Meter ohne Bildaussetzer geflogen bin. Wer weiter weg fliegen möchte, braucht schon gute Augen oder ein Fernglas, um dann überhaupt noch den Copter im Notfall zurückfliegen zu können.
Anzeigegerät: Brille oder Monitor?
Hier gibt es wieder verschiedene Alternativen. Wer das FPV-Fliegen erstmal testen möchte, kann einen einfachen Monitor nehmen. Hierfür eignet sich zum Beispiel ein Monitor aus dem KFZ Bereich, da diese häufig mit 12Volt betrieben werden und so einfach mit einem 3 Zellen LiPo mit Strom versorgt werden können. Ein günstiger Einstieg geht mit dem 7 Zoll Auto Monitor für 24,89USD. Die 7 Zoll sind ausreichend, um genug zu sehen und fliegen zu können. Zudem habt ihr die Möglichkeit, immer wieder vom Monitor direkt auf den Copter zu schauen, was gerade bei Start und Landung sehr hilfreich sein kann.

Wer tiefer in die Tasche greifen kann und auch ein größeres Immersionsgefühl erleben will, der sollte über eine Videobrille nachdenken. Mit dieser „taucht“ man direkt in den Copter ein und hat wirklich das Gefühl der Pilot zu sein und das Ganze zu steuern. Ein gutes Set ist das Fatshark Predator V2 Set, welches euch nicht nur eine Videobrille sondern auch einen passenden Sender und eine passende Kamera liefert. Leider ist das Ganze mit etwa 350€(!) nicht ganz günstig. Jedoch habt ihr hier ein Rundum-Sorglos-Paket für den ambitionierten Einsteiger, welches in Deutschland ohne Probleme betrieben werden kann.
Achtung: es werden auch viele Sets ohne CE-Zeichen oder mit zu hoher Sendeleistung vertrieben. Hier kann zwar (auf dem ersten Blick) gespart werden, aber es kann zu Problemen führen, deswegen wollen wir an dieser Stelle nicht weiter darauf eingehen.
Fazit … finally!
Ich hoffe ich konnte euch ein wenig den Einstieg in die Selbstbau-Copterwelt ermöglichen, auch wenn es eine Menge an Informationen gab. Ich denke je nach Geschmack und Geldbeutel lässt sich so für jeden ein passender Quadrocopter in 250er Größe finden und zusammenstellen. Vor allem lässt sich preiswert modular einsteigen und Stück für Stück aufrüsten. Für mich/uns ist das Schrauben und Fliegen mit Coptern (egal ob groß oder klein) zu einem extrem spannenden Hobby herangewachsen. Ist von euch schon jemand mit den kleinen Flitzern unterwegs oder plant jetzt den Einstieg? Habt ihr Fragen? Schreibt euren Fortschritt oder eure bisherigen Videos gerne in die Kommentare!
Nachtrag: so sehen die fertigen Copter aus!


Wenn du über einen Link auf dieser Seite ein Produkt kaufst, erhalten wir oftmals eine kleine Provision als Vergütung. Für dich entstehen dabei keinerlei Mehrkosten und dir bleibt frei wo du bestellst. Diese Provisionen haben in keinem Fall Auswirkung auf unsere Beiträge. Zu den Partnerprogrammen und Partnerschaften gehört unter anderem eBay und das Amazon PartnerNet. Als Amazon-Partner verdienen wir an qualifizierten Verkäufen.


Sortierung: Neueste | Älteste
Kommentare (886)